




















This drone can dynamically fold and unfold its arms to pass through narrow gaps
Late last year, we wrote about a foldable drone from Davide Scaramuzza’s lab at the University of Zurich that could change its shape in mid-air to squeeze through narrow gaps. That drone used servos to achieve a variety of different configurations, which made it very flexible but also imposed a penalty in complexity and weight. At ICRA in Montreal earlier this year, researchers from UC Berkeley demonstrated a new design for a foldable drone, able to shrink itself by 50 percent in less than half a second thanks to spring-loaded arms controlled by the power of the drone’s own propellers.
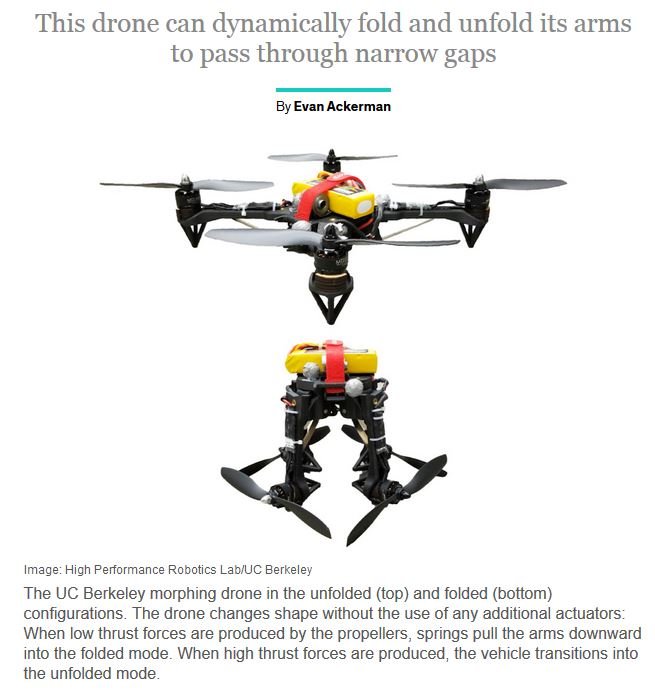
The trick here is that the springs are exerting constant tension on the passively hinged arms of the quadrotor. It’s enough tension to snap the arms inwards when the motors are off, but when the motors are on, the force that they exert is stronger than the tension exerted by the springs, snapping the arms out again and keeping them there. The actual transition point (where the force exerted by the motors overcomes the tension on the springs, or vice versa) has been carefully calibrated to make sure that the quadrotor stays a quadrotor most of the time, and only folds up when you want it to.
There is, however, just a little bit of fudging going on in the above video—the researchers got the quadrotor’s trajectory all set up to do the approach, fold, unfold, and recovery, and then aligned the actual window up with that trajectory afterwards. So there’s really no autonomy here, and the quadrotor itself has no idea that the window even exists.
It’s possible to look at a folding drone like this and wonder why you don’t just make a conventional drone small enough to fit through the gaps that you care about, and then call it a day. The reason to make a drone larger rather than smaller is primarily that it can carry more payload and stay in the air longer, and also because having motors that are farther away from each other makes the drone much more stable and better able to resist disturbances like wind.
The big advantage of this design is that it adds a relatively small amount of complexity while still enabling dynamic folding that significantly reduces the size of the quadrotor, and in its unfolded state, it’s just as easy to control as a quadrotor that can’t fold. The researchers also say that they could potentially get the quadrotor to fold up into an even more compact configuration—the constraint at the moment is that if it gets any smaller, the blades start to intersect, but because each propeller counter-rotates relative to its two neighbors, if you keep them spinning at the same rate “the speed of the blades relative to each other would be small and any collisions between blades would be minor.” That sounds quite tricky, and we’d love to see it in action.
“Design and Control of a Passively Morphing Quadcopter,” by Nathan Bucki and Mark W. Mueller from UC Berkeley, was presented at ICRA 2019 in Montreal, Canada.
Credits: spectrum.ieee













{kind=link}